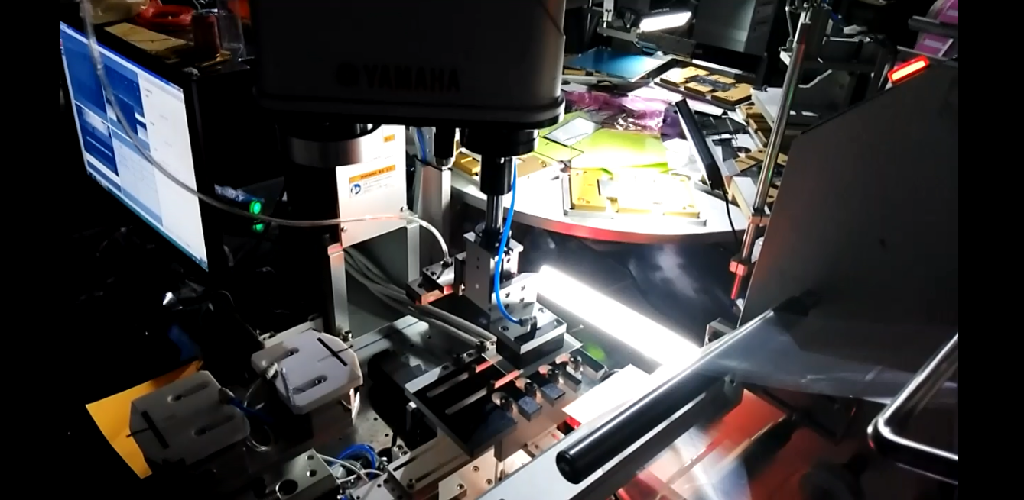
机器人视觉的手机背光板模组贴合应用
上图现场照片为我司为深圳一家知名手机背光贴合设备制造厂商提供的机器人视觉贴合解决方案。 之前的传统工艺在做手机背光贴合一般采用人工贴合或者机械定位贴合。随着手机制造业工艺的不断提升,对手机制造的要求也越来越高,其制造工艺远远满足不了目前iPhone 手机对贴合精度高的要求,因其我司针对目前制造业的弊端,为该公司提供视觉机器人贴合的解决方案,大大提高产品贴合的一致性与精度要求。 该方案中的贴合动作流程大致如下:机器人取料——3个工位相 机拍照(两张手机背光模,一个胶框工位)——识别对位——机器人 放置第一层模与胶框贴合——机器人旋转放置第二层模与第一层模 贴合——转盘旋转至下一工位。
文章分类:
手机系统集成
|
产品中心
STM模组
直线电机
力矩电机
伺服电机
驱动器
精密模组
激光切割行业
半导体行业
锂电池
应用行业
售后服务条款
维修地址
技术服务

扫码关注
SERVOTOP官方微信公众号
关于我们
公司简介
企业资质
校园招聘
合作联系
联系我们